I don't think I understand something. If for example on a wing that uses 3 servos for an aileron, does this require a battery for each servo? Which would mean an encoder and decoder for each servo? Maybe I missed this part!?!
My apologies for not explaining this part properly and a very good question.
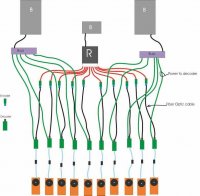
You need one encoder and one decoder for each channel, but in the case of 3 servos per aileron , you can either use 3 encoder/decoder which is 3 channels or simply Y connect which is not my recommendation.
So look at it as simply a servo extension to be used on all channels to keep the receiver totally isolated from the servos.
Now as for the battery/ies, you would use One large battery for all servos or if you prefer to use two , then so bit it. but the rx gets its own battery which can be as little as 500 ma but I use 1000 ma lipo, and Lipo is not the driving force here , voltage is so you can use any chemical battery you want . if you use HV servos, not a problem with 2s lipos. same with the rx , if you use two rxs you can power both with one 1000 ma lipo.
If this is not clear , by all means let me know, remember I was a Robotics engineer, not a teacher so explaining things was not my forte lol
For all my own installations, I use one rx only, one small rx battery and one larger servo battery, I made a power bus to plug in the servo/decoder power